

























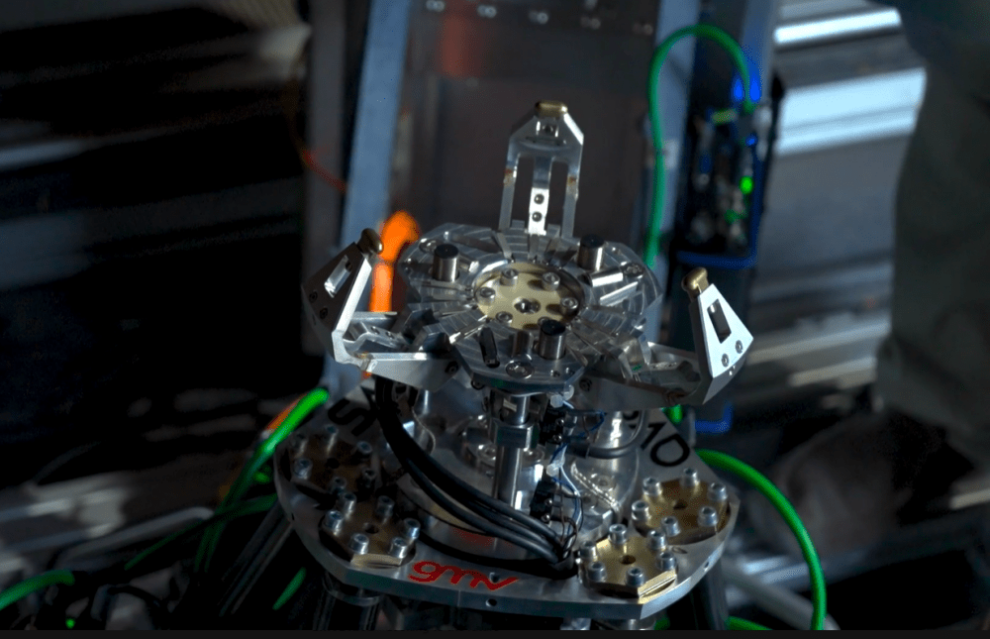
GMV prueba tecnologías para la eliminación de deshechos espaciales, mantenimiento, reabastecimiento y ensamblaje en órbita de infraestructuras complejas.
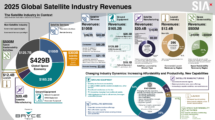
A medida que el ecosistema espacial crece y se diversifica, es crucial abordar cuestiones relacionadas con la sostenibilidad del espacio, con el fin de garantizar que su uso sea responsable y a largo plazo. En el ámbito de la sostenibilidad, la ESA y la Unión Europea han preparado la nueva generación de satélites de observación de la Tierra para su posible eliminación al final de su vida útil o en caso de fallo. Cuatro de estos satélites, pertenecientes a la nueva generación de misiones de observación de la Tierra (Copernicus), están siendo equipadas con el dispositivo MICE (interfaz mecánica para la captura al final de su vida útil desarrollada en España por parte de GMV en colaboración con AVS). Esto facilitará su futura captura no cooperativa y su eliminación de la órbita al final de su vida útil o en caso de fallo.
En su laboratorio de robótica platform-art©, GMV prueba actualmente tecnologías que harán posible el futuro ecosistema de transporte, mantenimiento y eliminación de desechos en órbita. El sistema robótico para la eliminación de basura espacial CAT ha sido diseñado como carga útil especializada y actúa conjuntamente con un vehículo de servicio, su sistema de guiado, navegación y control (GNC) para efectuar la aproximación, sincronización, captura, estabilización y aseguramiento del conjunto final, con el objetivo de eliminar de la órbita la nave espacial fallida o no controlada. Consta de 6 brazos y una garra que puede atrapar al satélite en desuso a eliminar.
El mantenimiento y el montaje en órbita también desempeñarán un papel clave en la futura economía espacial, al optimizar los costes de lanzamiento y hacer posibles nuevos esquemas de misión flexibles y escalables. El robot de ensamblaje multibrazo (MIRROR), con la financiación de la ESA y liderado por GMV, es el primer prototipo europeo de sistema robótico autorreubicable para operaciones en órbita. Puede realizar el ensamblaje de grandes estructuras en órbita y ofrecer servicios de mantenimiento, reparación o actualizaciones a diferentes vehículos e infraestructuras espaciales.
El diseño de naves espaciales modulares y la capacidad de reabastecimiento de combustible son factores clave para aumentar la vida útil, mejorar el rendimiento o incluso permitir la reconfiguración dinámica de los objetivos de la misión. El dispositivo mecánico ASSIST es la primera y más avanzada iniciativa europea encaminada a la estandarización de las interfaces de reabastecimiento de combustible de satélites. Basado en un enfoque de interfaz abierta, se encuentra actualmente en progreso para su demostración en órbita.





Añadir comentario