















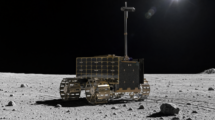














Un nuevo robot espacial de GMV vuelve a la Dehesa de Navalvillar, de Colmenar Viejo (Madrid), para realizar pruebas para futuras misiones lunares. RAPID (Robust and -Semi- Autonomous Platform for increased Distances) se dedica a explorar el territorio a velocidades que nunca se han alcanzado en la Luna, para ayudar a futuros astronautas que podrían poblar la superficie lunar.
Los objetivos de búsqueda son encontrar rocas con cierto tipo de minerales, orografías particulares, restos de humedad o huellas de antiguos torrentes. Durante la primera quincena de julio, GMV ha desarrollado pruebas de campo, en el marco de un proyecto de robótica espacial de la Agencia Espacial Europea (ESA).
En este contexto, y dentro del proyecto RAPID, GMV está desarrollando un róver autónomo capaz de atravesar áreas lunares de forma segura a una velocidad media de 1,1 m/s (3,96 km/h), una velocidad jamás alcanzada en la superficie de un planeta lejano por un robot autónomo, utilizando un sistema de guiado, navegación y control (GNC) basado en navegación visual, es decir en imágenes generadas/adquiridas por cámaras instaladas en el róver.
La Luna es el próximo paso en la exploración humana. El agua, así como otros materiales volátiles y lunares, como por ejemplo regolitos, metales o elementos de tierras raras (REE), presentan recursos potenciales que pueden respaldar la exploración humana y robótica de forma sostenible en la Luna, el Sistema Solar y más allá. Los polos lunares son particularmente interesantes para la exploración, pero representan un entorno muy duro, con temperaturas muy bajas (por debajo de 30K/-243 Celsius) y condiciones de iluminación muy difíciles.
En una primera tarea del proyecto se definieron las características del terreno para la misión y posteriormente, GMV diseñó la plataforma móvil RAPID, capaz de cumplir con los requisitos propuestos, en particular la velocidad. Para ello, se hizo necesario una mejora de todos los subsistemas involucrados: suspensión, características de las ruedas, motores, sistema de potencia, así como la ejecución de varias simulaciones de la interacción del róver con el suelo para garantizar que éste no perdiese el contacto con el mismo, patinase o volcara durante las travesías. Aparte, GMV ha desarrollado un subsistema semiautónomo de guiado, navegación y control (GNC), con el principal objetivo de alcanzar la conducción continua, es decir, ir más allá del estado actual de la técnica (stop-and-go), evitando paradas durante las travesías. El proyecto incluye un centro de control, con el cual se pueda comandar el róver usando distintos niveles de autonomía: desde la teleoperación hasta el envío de comandos autónomos (por ejemplo, ir a un punto dado de forma autónoma).








Añadir comentario