




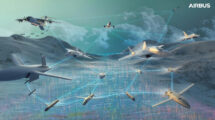





















CATEC ha validado en vuelo en sus centros ATLAS su nueva tecnología de navegación sin GNSS. Está pensado para uso en entornos de GNSS denegado y zonas hostiles de operación, dirigida de manera específica para su aplicación y trasferencia al sector de los drones /UAS en el campo de la defensa y la seguridad.
Se trata de un sistema altamente tecnológico de navegación propio de CATEC. Está basado únicamente en sensores embarcados para estimar la posición, velocidad y orientación relativa al punto de despegue. Su computación se produce completamente a bordo de la aeronave, sin necesidad de información previa del entorno donde se despliegue, ni de infraestructura externa o comunicaciones con otros sistemas. Esta solución destaca por sus reducidas dimensiones y peso. Es especialmente atractiva para integrarse en otras aeronaves de ala fija o rotatoria, de distintos tamaños y dinámicas de vuelo.
Una versión inicial del sistema fue presentada en abril durante la tercera Campaña de Experimentación Táctica 2026 (TEC-3) del Ejército de Tierra celebrada en la Base “Álvarez de Sotomayor” en Viator (Almería), orientada a validar nuevas capacidades y tecnologías en el marco del proceso de transformación del Ejército de Tierra. El sistema se validó en condiciones reales en campo y recorriendo distancia de hasta 5 km. con un error acumulado de unos 100 metros (2%).
Para completar esta solución de navegación sin GNSS, CATEC ha incorporado sus capacidades y conocimientos en odometría visual-inercial (VIO) y técnicas de fusión sensorial avanzadas. Permiten la localización y navegación autónoma de aeronaves en entornos donde la señal GNSS está degradada o completamente denegada. Se construye una solución robusta que fusiona información visual e inercial procedente de sensores embarcados, garantizando estimaciones fiables incluso en condiciones adversas y sin la necesidad de contar con infraestructura existente o adicional.
El uso de algoritmo de VIO permite estimar en tiempo real la posición, velocidad y orientación de una aeronave combinando la información proveniente de una o varias cámaras embarcadas y un sensor inercial (IMU), algo que es esencial en entornos donde las señales GNSS están degradadas o denegadas, como ocurre en operaciones en zonas con riesgo de interferencias. De este modo, al incorporar el algoritmo VIO se combina lo mejor de cada sistema, en odometría, la capacidad de la visión para proporcionar información absoluta del entorno, y la rapidez de la IMU para cubrir movimientos rápidos y escenas pobres en textura.
Asimismo, el sistema se ha completado con el uso de técnicas de optimización probabilísticas de fusión sensorial. Esto permite optimizar una ventana temporal de estados, aprovechando mejor la información histórica y las correlaciones entre los sensores.







Añadir comentario