



























UAV Navigation ensaya con éxito su proyecto de I+D de navegación por visión, orientado a reducir el error de posición de los UAVS durante la navegación sin señala GNSS.
UAV Navigation sigue sumando éxitos en su su proyecto de I+D, Sistema de Navegación por Visión (Visual Navigation System, VNS) , un sistema que reduce en gran medida el error de posición acumulado durante la navegación sin señal GNSS, lo que comúnmente se conoce como Navegación Inercial.
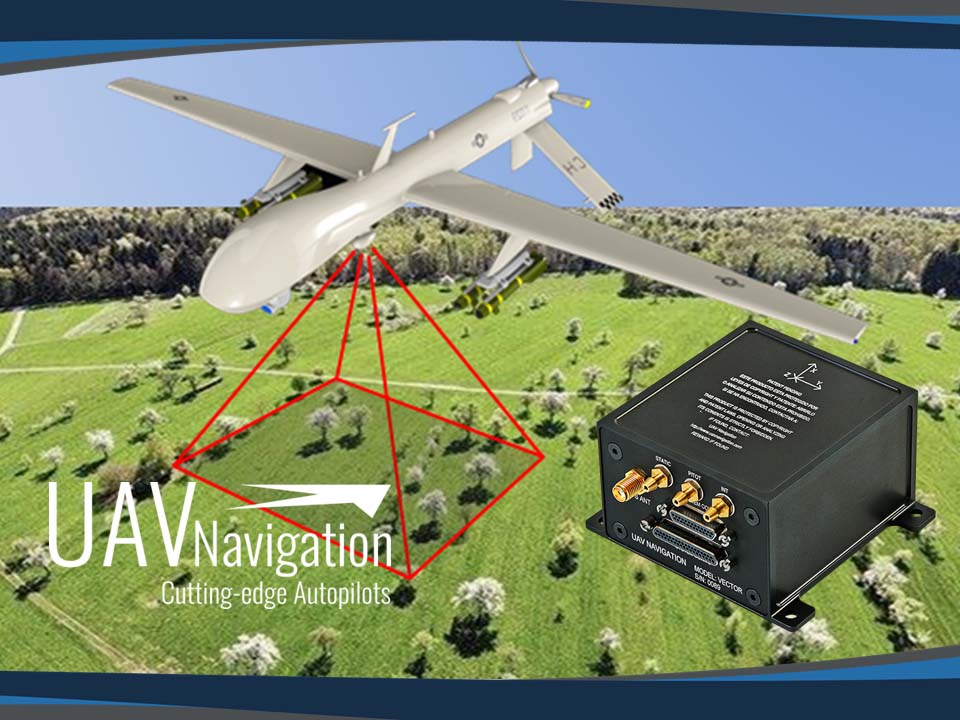
Las primeras pruebas en condiciones de vuelo real se han culminado con éxito, demostrando una perfecta integración con la solución de control de vuelo de UAV Navigation y mejorando notablemente su capacidad de navegación sin GNSS.
El sistema de Navegación por Visión saca todo el partido de las técnicas de odometría visual para determinar la posición y orientación de la aeronave, analizando y procesando imágenes capturadas por una cámara instalada en la parte inferior de la aeronave.
Los receptores de GNSS son comúnmente utilizados para obtener información posicional y poder reducir el error acumulado por los sensores inerciales basados en tecnología MEMs.
Los sensores desarrollados por de UAV Navigation son tolerantes a errores en la señal GNSS (normalmente en escenarios sin señal GNSS) y pueden operar inercialmente sin comprometer la seguridad del vuelo.
Sin embargo, la navegación prolongada sin GNSS puede llevar a una acumulación del error en la navegación, momento en el que el Sistema de Navegación por Visión cobra valor. Las imágenes tomadas por la cámara son procesadas por un pequeño procesador a bordo, traduciendo la imagen a posiciones de la aeronave.
Esta información puede ser combinada con los sensores inerciales para reducir el error acumulado por debajo del 1% de la distancia recorrida, eliminando la vinculación del error al tiempo.








Añadir comentario