



























El helicóptero Ingenuity completó con éxito su sexto vuelo pese a un problema que le hizo oscilar durante la última parte del mismo.
Aunque se había previsto que sólo realizase cinco vuelos, el éxito de estos y el buen estado del helicóptero Ingenuity y de sus baterías, llevaron a la NASA a realizar más vuelos en Marte.
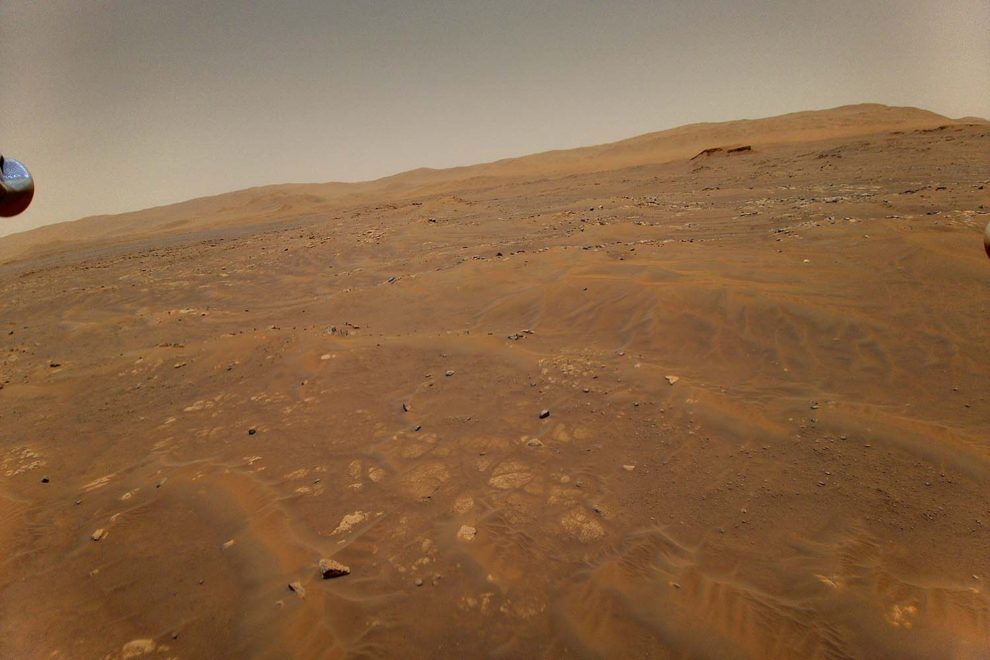
Así, en el día marciano 91 de la misión del rover Perseverance, el Ingenuity completó su sexto vuelo. Este tenía como objetivo ampliar la envolvente de vuelo y comprobar la capacidad para tomar fotos estereoscópicas en vuelo, concretamente de una región al este de su posición y que rea de interés para el personal de la misión.
Así, el Ingenuity fue programado para ascender a 10 metros de altura, desplazarse 150 metros hacia el suroeste a 4 metros por segundo. Acto seguido moverse 15 metros al sur mientras tomaba las fotos hacia el este. Finalmente, volar 50 metros hacia el noreste y aterrizar.
Durante el vuelo, cuando iba a cambiar de trayectoria al final de los 150 primeros metros del mismo, el helicóptero comenzó a ajustar su velocidad y a oscilar hasta más 20 grados adelante y atrás, acompañados de picos de consumo eléctrico, mientras completaba el resto del vuelo y aterrizaba según los previsto.
Tras el análisis de la telemetría, los técnicos de la NASA dedujeron que el problema había estado en una foto perdida en su sistema de navegación.
Según han explicado, Ingenuity usa dos sistemas para comprobar su posición y movimiento en todo momento. El principal es una unidad de medida inercial, que mide aceleraciones y rotaciones. A partir de ahí se calcula posición, velocidad, y actitud (su orientación espacial). Con esos datos, el sistema de control ajusta estos a los parámetros establecidos mediante 500 comandos por segundo.
Este sistema, sin embargo, continuan, puede acumular errores con el tiempo “y el helicóptero eventualmente perdería el rumbo”.
Para evitar este problema, se cuenta con la cámara de navegación. Esta va tomando 30 imágenes por segundo del terreno bajo el helicóptero y las carga en el sistema de navegación. Allí, un algoritmo examina primero la marca horaria de la imagen para comprobar cuándo se ha tomado. Acto seguido, en función de las anteriores, predice como tenía que ser esta mediante el reconocimiento de piedras u otras marcas o sombras en el terreno. Con ello compara la imagen con la predicha y establece la posición en función de las diferencias.
Según el análisis posterior al vuelo, cuando habían transcurrido unos 54 segundos, hubo un problema y el sistema “perdió” una de esas imágenes. A consecuencia de ello, la marca temporal de las siguientes fotos estaba mal. Y claro, a partir de ahí, el algoritmo trabajaba a partir de información errónea y había un desfase entre lo que se debía ver y lo que se veía en las imágenes. Ello causó que el sistema tratase de corregir el error fantasma de posición continuamente.
Al final, pese a ello, Ingenuity completó el vuelo y aterrizó con seguridad, solo que a unos 5 metros del lugar previsto. Desde la NASA han explicado que el sistema de control cuenta con un amplio margen de estabilidad para tolerar “errores significativos sin volverse inestable, incluyendo errores en el cronometrado”. Además, el sistema prescinde de las fotos en la fase final de descenso y aterrizaje “para garantizar una estimación suave y continua del movimiento del helicóptero durante esta fase crítica. Esta decisión de diseño también dio sus frutos durante el sexto vuelo: Ingenuity ignoró las imágenes de la cámara en los últimos momentos del vuelo, dejó de oscilar, niveló su actitud y tocó tierra a la velocidad diseñada”, ha señalado Havard Grip, piloto jefe de Ingenuity en el Jet Propulsion Laboratory de la NASA.









Añadir comentario